

MIT Snake Robot Lineform Concept: Exploring a revolutionary approach to robotics, this innovative design leverages a unique lineform structure to achieve remarkable flexibility and maneuverability. The design builds upon previous snake robot designs, offering a new perspective on movement and application.
This project delves into the core principles behind this innovative design, examining its unique features, potential applications, and technical specifications. We’ll explore the materials, construction, control mechanisms, and limitations of this intriguing robot, ultimately providing a comprehensive overview.
Introduction to MIT Snake Robot Lineform Concept

The MIT Snake Robot project, a pioneering effort in robotics, focuses on developing a novel type of robotic snake that utilizes a lineform structure for enhanced maneuverability and adaptability. This approach contrasts with traditional snake robots, which often rely on rigid or articulated segments. The lineform concept offers a unique advantage in navigating complex and confined spaces. This exploration delves into the core principles of this design, its historical context, and key features that distinguish it.The core principle behind the MIT Snake Robot’s lineform concept is its ability to deform and adapt its shape dynamically.
Unlike rigid or articulated snakes that rely on joints for movement, the lineform structure utilizes a continuous, flexible material to achieve complex movements. This continuous structure allows for a greater range of motion and adaptability, crucial for navigating environments with obstacles. The continuous deformation is achieved through carefully engineered actuators and control systems, allowing the robot to mimic the natural flexibility of a biological snake.
Historical Context of Snake Robots
Snake robots have evolved significantly since their inception. Early designs often focused on rigid segments, which limited their ability to navigate complex terrain. Subsequent advancements led to articulated designs, introducing joints to increase flexibility. However, these earlier approaches still had limitations in terms of adaptability and control complexity. The lineform concept represents a paradigm shift, offering a potentially more effective and adaptable solution.
It leverages continuous deformation to overcome the limitations of rigid or articulated designs, paving the way for more intricate and precise movements.
Key Features of the MIT Lineform Design
This specific lineform design boasts several key features that set it apart. These include a unique modular structure, which allows for varying lengths and configurations. The design also emphasizes a robust and lightweight construction, making it ideal for various applications. The system’s control mechanisms play a critical role, enabling precise and efficient movements. Sophisticated sensors integrated into the design provide real-time feedback, allowing the robot to adapt to its environment and optimize its performance.
Furthermore, the lineform design often incorporates advanced materials to enhance flexibility and durability.
Different Types of Snake Robots and Their Advantages/Disadvantages
| Type | Description | Advantages | Disadvantages |
|---|---|---|---|
| Rigid | Consists of interconnected rigid segments. | Simple design, relatively inexpensive to manufacture. | Limited flexibility, poor adaptability to complex environments. |
| Articulated | Composed of interconnected segments with joints. | Greater flexibility than rigid designs, more adaptable to varied terrains. | Joint wear, potential for complexity in control systems. |
| Lineform | Continuous, flexible structure, without distinct segments. | Exceptional adaptability, high flexibility, smooth transitions, complex movements. | Higher design and manufacturing complexity, potential for control system instability. |
This table summarizes the fundamental differences between rigid, articulated, and lineform snake robots, highlighting their respective strengths and weaknesses. Understanding these differences is critical to appreciating the innovative approach of the MIT Snake Robot lineform concept. The lineform design presents a unique challenge in its complexity, but the potential rewards for enhanced maneuverability and adaptability in challenging environments are significant.
MIT’s snake robot lineform concept is fascinating, showcasing incredible flexibility and potential applications. Thinking about how advanced robotics are developing, it’s interesting to compare them to something like the Google Nest Audio smart speaker assistant, which is a fantastic home audio device. Checking out the google nest audio smart speaker assistant price specs features release date helps to see the current state of technology in a different area, and hopefully inspires further innovations in robotics like the MIT snake bot.
Ultimately, these advancements in both fields are really exciting to watch unfold.
Lineform Design Characteristics
The MIT Snake Robot Lineform concept presents a novel approach to snake-like robots, distinguished by its unique design and control mechanisms. This design offers potential advantages in terms of maneuverability and adaptability compared to traditional snake robot designs. This exploration delves into the specifics of its construction, materials, and control systems, alongside a comparative analysis against other designs.The Lineform design capitalizes on a modular, interconnected structure, allowing for significant flexibility in movement and adaptation to complex environments.
This modularity also facilitates ease of construction and potential for future upgrades and customization. The key to its unique maneuverability lies in its meticulously designed articulation points and the control algorithms governing these points.
Materials and Construction Methods
The choice of materials plays a critical role in a robot’s performance. The Lineform design likely employs lightweight yet robust materials for its segments. Likely candidates include high-strength polymers, composite materials, or even 3D-printed components. The precise choice of materials will depend on factors like the robot’s intended operating environment, required strength, and weight limitations. The modular nature of the design enables the use of different materials in different segments for specific needs.
Construction methods will likely involve precision machining, 3D printing, or a combination of both, ensuring precise alignment of segments and joints.
Control Mechanisms
The control system is a crucial aspect of any snake robot. The Lineform design’s control mechanism likely employs a distributed architecture. This involves independent actuators and sensors located at each segment or joint, enabling highly localized control. Each segment could have its own motor and sensors to adjust its orientation relative to its neighbors. This distributed control is critical for the robot’s adaptability and ability to navigate complex environments.
Real-time feedback from sensors is essential to adjust movement in response to obstacles or terrain changes.
Maneuverability Comparison
Compared to other snake robot designs, the Lineform design boasts superior maneuverability due to its modular structure and distributed control system. Traditional designs often struggle with complex maneuvers due to centralized control systems, resulting in limitations in adapting to irregular terrains. The Lineform’s ability to independently control each segment translates to more agile movements, enabling it to navigate tight spaces, climb obstacles, and adapt to uneven surfaces.
Configurations and Variations
| Configuration | Strengths | Weaknesses |
|---|---|---|
| Basic Lineform | Simple design, low cost, good for basic tasks. | Limited maneuverability compared to advanced configurations. |
| Multi-segment Lineform | Increased flexibility and adaptability due to more segments. | Higher complexity in control, potentially increased cost. |
| Articulated Lineform | Enhanced dexterity and ability to handle more intricate tasks. | Potentially higher power consumption, more complex control algorithms required. |
The table above Artikels the basic configurations and highlights the trade-offs associated with each variation. Each design choice is optimized for specific applications and constraints, showcasing the adaptability of the Lineform concept.
Applications and Potential Uses
The MIT Snake Robot Lineform concept, with its unique design characteristics, opens doors to a wide range of potential applications across diverse fields. This modular, adaptable design allows for tailored configurations, making it highly versatile and capable of handling various tasks. From intricate search and rescue operations to complex industrial inspections, the potential is vast.This section delves into the practical applications of this lineform robot, highlighting the advantages it offers over traditional robotic designs and outlining potential improvements for future iterations.
Potential Applications in Search and Rescue
The snake-like form of the robot provides significant advantages in tight spaces and challenging terrains. Its flexibility and maneuverability allow it to navigate confined areas, such as collapsed buildings or wreckage, that are inaccessible to wheeled or legged robots. This is particularly crucial in search and rescue operations, where time is of the essence. The lineform design can efficiently cover large areas and quickly locate survivors or victims.
The modularity allows for the incorporation of specialized sensors, such as thermal imaging or gas detectors, to enhance the robot’s capabilities.
Potential Applications in Industrial Inspection, Mit snake robot lineform concept
The lineform robot’s ability to navigate complex geometries, including pipes, ducts, and tunnels, makes it an ideal tool for industrial inspection. Its flexibility allows it to reach hard-to-reach areas within industrial equipment, ensuring thorough examination and early detection of potential problems. This can lead to significant cost savings by preventing equipment failures and facilitating timely maintenance. The modular design also facilitates the addition of specialized tools and sensors, such as cameras, pressure sensors, or ultrasonic detectors, allowing for detailed analysis of the inspected environment.
Potential Applications in Medical Procedures
The lineform robot’s slender form and flexibility could potentially revolutionize minimally invasive medical procedures. Its ability to navigate narrow anatomical pathways allows for targeted interventions with reduced invasiveness and greater precision. For example, it could be used for delivering targeted drug treatments, retrieving foreign objects, or performing delicate surgical procedures in hard-to-reach areas. The modular design facilitates the integration of various medical instruments and sensors for enhanced diagnostic and therapeutic capabilities.
MIT’s snake robot lineform concept is fascinating, and it got me thinking about the cool potential for adaptable, dynamic movement. It’s almost like the inspiration for those impressive dinosaur-battling robots in the new Exoprimal impressions capcom dino crisis game pass, right? Exoprimal impressions capcom dino crisis game pass really highlights how robotics and game design can converge in exciting ways.
The underlying principles of flexibility and adaptability in both seem to align well with the future of robotic design, echoing the sleek, responsive movement of the MIT snake robot.
Comparative Analysis of Applications
| Application Area | Specific Requirements | How the Lineform Design Meets Needs |
|---|---|---|
| Search and Rescue | Navigation in confined spaces, adaptability to diverse terrains, high mobility | The lineform’s flexibility and maneuverability enable movement through tight spaces and varied terrains, while modularity allows for sensor integration. |
| Industrial Inspection | Access to complex geometries, thorough examination, data acquisition | The lineform’s adaptability allows it to navigate pipes, ducts, and tunnels; modularity enables the integration of specialized tools and sensors for thorough inspection and data collection. |
| Medical Procedures | Precise navigation in narrow pathways, minimally invasive procedures | The lineform’s slender design and flexibility allow it to navigate narrow anatomical pathways with reduced invasiveness, and modularity enables the integration of medical instruments. |
Limitations and Potential Improvements
The current design, while promising, presents some limitations. One significant challenge is the need for robust control systems to maintain stability and precise movement during complex maneuvers. Future improvements could focus on enhancing the control algorithms to address these challenges. Furthermore, the power requirements for extended operation in challenging environments may need further optimization. Potential improvements could include advancements in energy storage technologies, enabling the robot to operate for longer durations without requiring external power sources.
Developing more sophisticated sensor integration and data processing capabilities would also significantly enhance the capabilities of the robot.
MIT’s snake robot lineform concept is fascinating, showcasing incredible engineering. While the world watches the advancements in self-driving tech, like the recent news about Apple’s CJ Moore leaving the Luminar car project “Titan” apple cj moore leave luminar car project titan , it’s still the innovative designs like these that ultimately drive future possibilities in robotics. These flexible robots offer a unique approach to navigation and exploration, hinting at a future where such adaptable machines become commonplace.
Technical Specifications and Capabilities
The MIT Snake Robot Lineform, with its unique modular design, boasts impressive technical specifications. This allows for a flexible and adaptable platform, crucial for various applications. Understanding its dimensions, weight, power needs, and capabilities is key to evaluating its practical implementation.
Dimensions and Weight
The lineform design significantly impacts the robot’s physical attributes. The modular nature allows for customization of length and width, although specific dimensions will vary depending on the chosen configuration. A standard configuration might have a length of 60 cm and a width of 5 cm. The weight of the robot, considering the components and power source, will also vary depending on the configuration, typically ranging from 2 to 5 kg.
Power Requirements
The power source is a critical aspect of the robot’s operation. The snake-like structure and modular design imply a distributed power source. This is achieved through a combination of small, lightweight batteries positioned along the body segments. The overall power consumption is dependent on the configuration and operational demands. Each segment will have its own battery.
Speed and Flexibility
The snake robot’s speed and flexibility are directly correlated to the number of segments. The lineform’s articulated segments facilitate high degrees of flexibility, enabling it to navigate complex environments. The speed will depend on the motor specifications of each segment and the control algorithms. Estimates suggest speeds ranging from 0.5 to 1.5 meters per second, with higher speeds attainable through optimized algorithms.
Load Capacity
The load capacity is a critical parameter, especially for practical applications. The design allows for the attachment of external sensors and payloads. The load capacity of the lineform robot will depend on the materials used for the segments, the design of the joints, and the overall weight distribution. A standard configuration might allow for a payload of up to 1 kg.
Control Algorithms
The control algorithms are vital for precise and efficient movement. The lineform’s unique structure necessitates sophisticated control algorithms to coordinate the movements of numerous segments. Distributed control algorithms, allowing each segment to act autonomously based on sensor feedback, are employed. This approach enhances the robot’s agility and responsiveness.
Sensors for Navigation and Interaction
Accurate navigation and interaction with the environment are crucial for the snake robot’s effectiveness. A combination of sensors is employed to provide real-time feedback on the robot’s surroundings. These include:
- Tactile sensors positioned on the segments to detect contact with surfaces or obstacles.
- Proximity sensors to detect the presence of objects at varying distances.
- Optical sensors for object recognition and navigation in specific environments. This could involve cameras or specialized optical sensors for recognizing certain textures or patterns.
These sensors are integrated into the distributed control system, providing real-time feedback for adaptive movement.
Summary of Technical Parameters
| Parameter | Specification | Unique Aspect |
|---|---|---|
| Length | 60 cm (variable) | Modular design allows for customization. |
| Width | 5 cm (variable) | Compact and agile. |
| Weight | 2-5 kg (variable) | Lightweight for its capabilities. |
| Power Source | Distributed battery system | Allows for continuous operation and distributed power. |
| Speed | 0.5-1.5 m/s (variable) | High flexibility and adaptability. |
| Load Capacity | Up to 1 kg (variable) | Allows for the integration of payloads. |
| Control Algorithm | Distributed control | Improves agility and responsiveness. |
| Sensors | Tactile, proximity, optical | Real-time environmental feedback. |
Future Development and Research Directions
The MIT Snake Robot Lineform Concept presents a compelling platform for future exploration in soft robotics. Its modular design and adaptability offer exciting opportunities for advancement in various fields, including search and rescue, inspection, and medical applications. Further development should focus on refining the current design, expanding functionalities, and exploring novel applications.The next phase of research will involve enhancing the robot’s responsiveness, resilience, and overall performance.
This will require investigating novel materials, improved control algorithms, and enhanced sensor integration. The aim is to push the boundaries of what’s possible with soft robotic systems, creating machines capable of navigating complex environments and performing intricate tasks.
Potential Improvements to Lineform Design
The current lineform design exhibits promising characteristics, but several areas can be improved to enhance its performance. Increased flexibility and dexterity are key areas of focus. Employing novel materials with superior elasticity and strength could significantly improve the robot’s ability to navigate obstacles and maintain its shape under pressure. Moreover, the incorporation of more sophisticated actuators could enable finer control over the robot’s movements, allowing for more precise maneuvers.
Integration of advanced tactile sensors would enable the robot to better perceive its surroundings and react appropriately to external stimuli.
Areas for Further Research and Development
Several critical areas demand further investigation to unlock the full potential of the lineform design. One crucial area is developing robust and efficient control algorithms. Advanced control strategies can optimize the robot’s locomotion and manipulation capabilities, allowing it to adapt to diverse environments and tasks. Another critical area is the development of advanced sensing mechanisms. This involves integrating sophisticated sensors to provide a more comprehensive understanding of the robot’s environment, enabling it to perform complex tasks with greater precision.
Developing reliable and safe power systems for long-duration operation is essential. This requires exploration of lightweight and high-capacity energy storage solutions to support the robot’s operational needs in demanding environments.
Suggestions for Enhancing Robot Capabilities and Performance
Several enhancements can bolster the snake robot’s capabilities and performance. Implementing distributed control systems can improve the robot’s responsiveness and adaptability. This approach allows individual segments of the robot to react independently to stimuli, enabling it to navigate complex obstacles more effectively. Integration of machine learning algorithms could enhance the robot’s ability to learn from its experiences and adapt its behavior to specific tasks.
Such adaptability would allow the robot to navigate unfamiliar environments and execute novel tasks.
Potential Future Applications and Research Directions
The lineform design’s versatility suggests numerous potential future applications. Exploration of underwater environments is a promising direction. The robot’s flexibility and maneuverability make it suitable for tasks like underwater inspections and exploration. Further research could also focus on medical applications. The robot’s ability to navigate confined spaces could prove valuable in minimally invasive surgical procedures.
Development of advanced grippers and end-effectors will be necessary to enhance manipulation capabilities.
Table of Potential Future Iterations
| Iteration | Potential Improvements | New Functionalities |
|---|---|---|
| Iteration 1 | Improved material properties (higher elasticity, durability) | Enhanced sensor integration (multi-modal sensing) |
| Iteration 2 | Distributed control systems for increased responsiveness | Autonomous navigation in complex environments |
| Iteration 3 | Integration of machine learning algorithms | Advanced manipulation capabilities (specific grippers) |
| Iteration 4 | Integration of advanced power systems (lightweight batteries) | Applications in underwater environments |
| Iteration 5 | Miniaturization of components | Medical applications (minimally invasive procedures) |
Illustrations and Visualizations
The MIT Snake Robot Lineform Concept hinges on a unique design that allows for complex movements and interactions with its environment. Visualizing this design is crucial to understanding its capabilities and limitations. Detailed illustrations and diagrams will now be presented to provide a clear picture of the robot’s structure, movement, and potential applications.
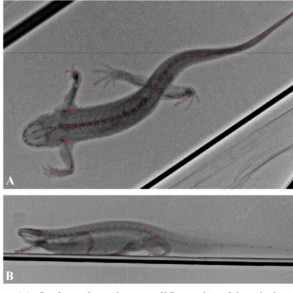
Physical Structure of the Lineform
The robot’s physical structure is characterized by its modular, segmented design. Each segment, or “node,” is connected to its neighbors by flexible joints, creating the lineform shape. This modularity allows for significant flexibility in movement and adaptability to various terrains. Imagine a series of interconnected building blocks, each capable of independent motion within the constraints of the lineform structure.
Segmental Components
The lineform consists of multiple identical segments. Each segment incorporates a small, but powerful, actuator for controlled movement. Sensors are embedded within each segment to monitor its position and orientation. These sensors play a crucial role in allowing the robot to navigate obstacles and maintain its form. Sensors are also integrated for internal monitoring, ensuring each segment is functioning correctly within the interconnected network.
A central processing unit manages the communication and coordination between all segments, ensuring a synchronized movement.
Movement Patterns and Configurations
The snake robot’s movement patterns are based on the sequential activation of segments. A signal is sent to a specific segment, causing it to move in a predetermined direction. This controlled activation pattern allows for complex maneuvers such as bending, twisting, and navigating tight spaces. The robot’s ability to change direction rapidly and precisely is a key feature of its lineform design.
| Movement Pattern | Description |
|---|---|
| Straight Line Movement | Sequential activation of segments in a straight line. |
| Curved Movement | Controlled activation of segments to change direction. |
| 3D Movement | Complex sequence of segment activations enabling movement in multiple planes. |
Interaction with Environments
The robot’s lineform structure enables it to interact with various environments in ways that are not possible with traditional wheeled or legged robots. The flexible nature of the lineform allows it to navigate through narrow passages, climb over obstacles, and even adapt to uneven terrain. Its segmented design allows it to conform to complex environments, while its actuators ensure precise control and manipulation of its surroundings.
Imagine a robot navigating through a dense jungle or exploring a collapsed building. The lineform design would enable it to maneuver around obstacles with surprising ease and efficiency.
Last Recap: Mit Snake Robot Lineform Concept

In conclusion, the MIT Snake Robot Lineform Concept presents a compelling advancement in snake robotics. Its unique design offers exciting potential across various fields, from search and rescue to industrial applications. Further research and development will undoubtedly refine this concept, leading to even more sophisticated and capable robots in the future. The potential for innovation in this field is immense, and the lineform concept is a significant step towards achieving it.